L’objet de cet article est de déterminer la vitesse réelle d’un train miniature, rapportée à sa grandeur nature, donc en Kilomètres par Heure, en fonction de l’échelle évidemment.
Bien évidement, cette mesure est réalisée avec un Arduino.
Voici la description de mon projet.
Mais pourquoi calculer la vitesse de nos petits trains ?
Il n’y a rien de plus décourageant que de voir un TGV se faire doubler par un ABJ (surtout pour les ingénieurs qui ont travaillé sur la conception du TGV, ceux de l’ABJ étant plutôt contents).
En tout cas cela permettra de pouvoir régler les décodeurs de nos machines en conséquence.
Alors, le projet ....
Sur un portion de voie droite, on met en place deux barrières infrarouges séparées par une distance connue (dans ma réalisation j’ai 22 cm). Une barrière infrarouge est constituée d’un émetteur et d’un récepteur de lumière infrarouge. L’article Une barrière infrarouge en décrit un exemple.
Lorsqu’un train traverse une barrière infrarouge, il coupe le faisceau lumineux invisible et son récepteur fournit un signal qui peut être interprété par l’Arduino.
Voici le raisonnement :
A) Nous avons donc un point d’entrée, un point de sortie et une distance fixe.
B) L’arduino nous permet de relever le temps parcouru par un véhicule entre les deux points.
C) Nous avons la formule magique V = D / T (Vitesse = Distance / Temps)
Où : V est en m/s, D est en mètres et T est en secondes.
Jusque là, tout est simple.
En réalité, la distance sera plutôt exprimée en centimètres (ici j’ai 22 cm), le temps en millisecondes, donné par l’instruction millis() et le donc le résultat en cm/s, en divisant par 1000.
Pour passer aux Km/H, à l’échelle 1, il faut en plus :
- multiplier par le facteur d’échelle (87 en HO ou 160 en N)
- multiplier par 3600 (le nombre de secondes dans une heure)
- diviser par 100.000, pour passer des centimètres aux kilomètres
donc :
- en HO il faut multiplier les cm/s par 3,132
- en N il faut multiplier les cm/s par 5,76
... ou faire autrement comme dans mon programme ci-dessous, pourvu que l’on obtienne la bon résultat.
Alors c’est parti :
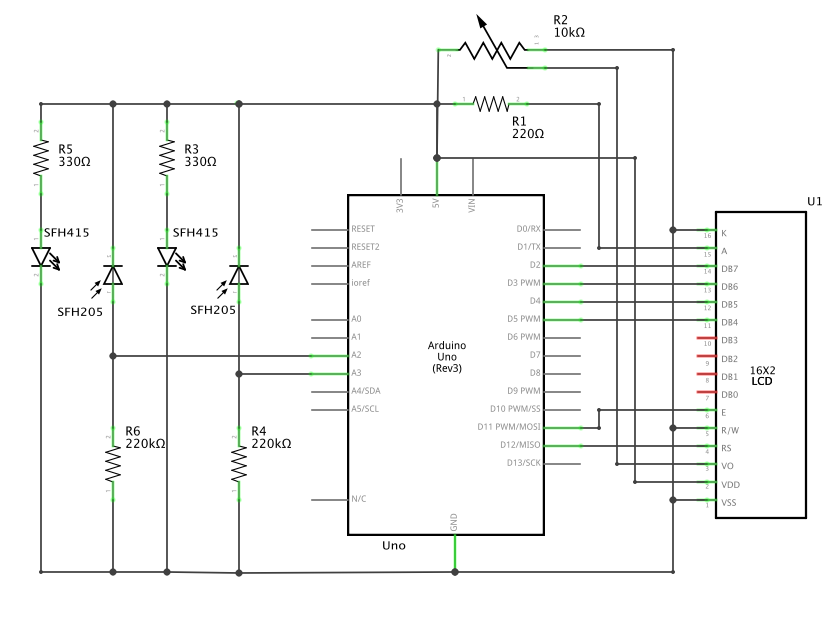
Commençons par le schéma du projet :
Nous voyons à gauche les 2 couples de Leds comprenant une diode émetteur infrarouge, type SFH415, alimentée à partir du 5V à travers une résistance de 330 Ohms et une diode récepteur infrarouge, type SFH 205, montée en inverse et protégée par une résistance de 220 KOhm. Les 2 récepteurs infrarouges reliés sont aux entrées A2 et A3 de l’Arduino.
Le choix de ces composants est important : il faut que l’émetteur et le récepteur aient pour caractéristique commune une même fréquence lumineuse (ici : 940 nm).
Le LCD est raccordé de façon classique :
- RS à la pin 12 de l’Arduino
- Enable à la pin 11
- D4 à la pin 5
- D5 à la pin 4
- D6 à la pin 3
- D7 à la pin 2
Et maintenant le code du programme
Le code est écrit en partant d’un des exemples "LiquidCrystal" de la bibliothèque intégrée de l’IDE Arduino. Il vous reste donc peu de choses à ajouter.
// Calcul de la vitesse d'un train miniature
// En passant devant deux led Ir
// Programme V 2.3
// Du 11/11/2013
// Par C.ARFEL
//
// Avec afficheur autonome
//
#include "LiquidCrystal.h" // Ajout de la librairie pour afficheur lcd
LiquidCrystal lcd(12, 11, 5, 4, 3, 2); // declaration des bornes du lcd
int IR1 = A2; // La diode IR 1 est branchee sur A2
int IR2 = A3; // La diode IR 2 est branchee sur A3
int compteur1 = 1; // variable enregistre un passage compteur 1
int compteur2 = 1; // variable enregistre un passage compteur 2
int temps1=millis(); // Variable prise de temps pour IR 1
int temps2=millis(); // Variable prise de temps pour IR 2
int temps3 = 0; // Variable pour le calcul du temps reel passe
float V = 0.0; // Variable Vitesse
float TTS = 0.0; // Variable temps passe en secondes
float VKM = 0.0; // Variable vitesse en KM/H
float VKMN = 0.0; // Variable vitesse en N
float VKMH0 = 0.0; // Variable vitesse en H0
void setup(){
lcd.begin(16,2); // Declaraton du type d'afficheur 16 cracteres sur 2 lignes
pinMode(IR1, INPUT); // Declaration de la broche A2 en "entree"
pinMode(IR2, INPUT); // Declaration de la broche A3 en "entree"
lcd.print("** En attente **"); // Affichage sur le lcd
}
void loop(){
int valIR1 = digitalRead(IR1);
// Lecture de broche A2 et mise du resultat dans la variable valIR1
int valIR2 = digitalRead(IR2);
// Lecture de broche A3 et mise du resultat dans la variable valIR2
if(valIR1 == LOW && compteur1 == 1) {
// Si passage devant IR1 ET compteur1 = 1 alors ....
temps1=millis(); // enregistrement dans temps1 de la valeur millis
compteur1 = compteur1 + 1;
// On rajoute +1 a compteur1 ce qui empeche le remplacement de la valeur de temps1
}
if(valIR2 == LOW && compteur2 == 1) {
// Si passage devant IR2 ET compteur2 = 1 alors ....
temps2=millis(); // enregistrement dans temps1 de la valeur millis
compteur2 = compteur2 + 1;
// On rajoute +1 a compteur2 ce qui empeche le remplacement de la valeur de temps2
}
if(compteur1 > 1 && compteur2 > 1) {
// Si les valeurs de Compteur1 ET de compteur2 sont differente de 1 alors le calcul peut debuter
temps3 = (temps2 - temps1);
// temps en millisecondes passez entre les deux capteurs
TTS = ((float)temps3 / 1000.0);
// conversion milisecondes en secondes
V = (0.22 / (float)TTS);
// calcul de d/t, ma distance est ici de 22 cm, soit 0,22 m
VKM = ((float)V * 3.6);
// conversion de la vitesse en m/s en KM/H
VKMN = ((float)VKM * 160.0);
// conversion de la vitesse a l'echelle N
VKMH0 =((float)VKM * 87.0);
// conversion de la vitesse a l'echelle H0
// Affichage des resultats sur le LCD
lcd.clear(); // on efface l'ecran
lcd.print(VKMN); // affichage de VKM N
lcd.println(" KMh en N"); //
lcd.setCursor(0, 1); // On deplace le curseur sur la 2 eme ligne
lcd.print(VKMH0); // affichage de VHM HO
lcd.println(" KMh en H0"); //
delay(10000); // delais de 10 secondes avant reprise du programme
// Pour permettre la liberation de la zone IR
compteur1=1; // Variable remise a 1
compteur2=1; // Variable remise a 1
temps1 = 0; // Variable remise a 0
temps2= 0; // Variable remise a 0
lcd.clear(); // on efface l'ecran
lcd.print("** En attente **"); // Affichage sur le lcd
}
}