Nous présentons d’abord les choix techniques qui facilitent l’installation des satellites comme prévu. Puis nous détaillons la réalisation autour d’un Arduino Nano, jusqu’au circuit imprimé professionnel.
Nous avons vus dans Les principes fondateurs les idées qui ont gouverné la conception de la carte Satellite V1. Il reste à décider du « combien » : combien de LEDs pour les signaux, combien de servomoteurs pour les appareils de voie, combien de détections. Ce combien conditionne le choix de l’Arduino. Dans ce domaine le choix n’est pas si vaste, nous avons les petits Arduino, Nano, Pro Mini, Uno, comportant une vingtaine de broches d’E/S ou les très gros comme le Mega comportant une soixantaine de broches d’E/S. Deux critères guidaient notre choix. Le premier est ce que nous appellons la « portée ». Le second est évidemment le coût unitaire de la prise en charge d’un dispositif, c’est à dire les ressources nécessaires sur l’Arduino.
La « portée » de l’électronique
On peut définir la « portée » comme ceci : si on fixe une longueur de fil maximum entre le Satellite et le dispositif, signal, servo, détecteur IR, combien de dispositifs sont « à portée » du Satellite sur le réseau ? Une question sous-jacente est « quelle est la longueur de fil maximum ». Pour des dispositifs pilotés en courant comme les LED, on peut aller assez loin, plusieurs mètres. Pour des dispositifs pilotés en tension, les fils doivent être courts, moins de 50cm. En se fixant ce critère de 50cm de longueur de fil entre le Satellite et le dispositif, il n’y a pas de réponse unique et universelle à la quantification de la « portée ». On sent bien que selon les réseaux, leur échelle, la densité des appareils de voie et des signaux, ça sera différent. En dehors des gares, on ne trouvera pas forcément d’appareil de voie et, en voie unique et circulation dans un seul sens, l’implantation minimum sera formée d’un feu et de deux détections. Sur un grill de sortie de gare on peut avoir beaucoup d’appareils de voie sur une courte distance.
En revanche, on comprend bien que si on pose sur le réseau un disque de 50cm de rayon dont le centre est occupé par le Satellite, on trouvera à « portée » des dispositifs variés.
Le coût unitaire
L’Arduino Nano se trouve pour environ 2€50. A cela il faut ajouter 3€50 pour le contrôleur et le transceiver CAN. Une fois retirées les 4 broches du SPI pour le contrôleur CAN, il reste 14 broches [1] pour les dispositifs et donc un coût unitaire de 43 centimes par dispositif [2]. L’Arduino Mega coûte environ 12€ soit 15€50 avec le CAN. 60 broches sont disponibles pour les dispositifs soit un coût unitaire de 26 centimes.
Toutefois, comme on l’a vue au paragraphe précédent, dans certaines parties du réseau, un Nano serait déjà sous employé avec seulement 5 dispositifs (3 LED pour le feu plus deux détections) avec donc un coût réel du dispositif de 1€20. Avec un Mega, le coût réel serait de 3€10. Pour que le Mega soit rentable par rapport au Nano, il faudrait au moins avoir 23 dispositifs à portée, ce qui même dans une zone dense est peu probable.
Comme vous l’aurez compris, le Nano a été adopté [3].
Affectation des broches
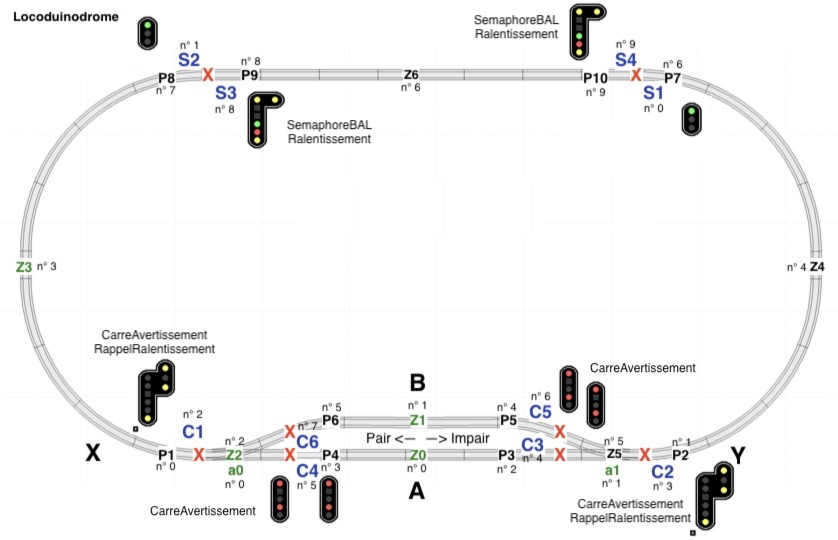
Le Satellite v1 a été fortement influencé par la topologie du Locoduinodrome qui comprend 7 zones (Z0 à Z6) avec détection de présence par consommation de courant, 10 détections ponctuelles (P1 à P10), 10 signaux (les carrés C1 à C6 et les sémaphores S1 à S4) et 2 aiguillages (a0 et a1).
Figure 1 : Implantation physique des signaux sur le Locoduinodrome
La numérotation des éléments, par exemple pour S2, n°1 est celle vue par le gestionnaire.
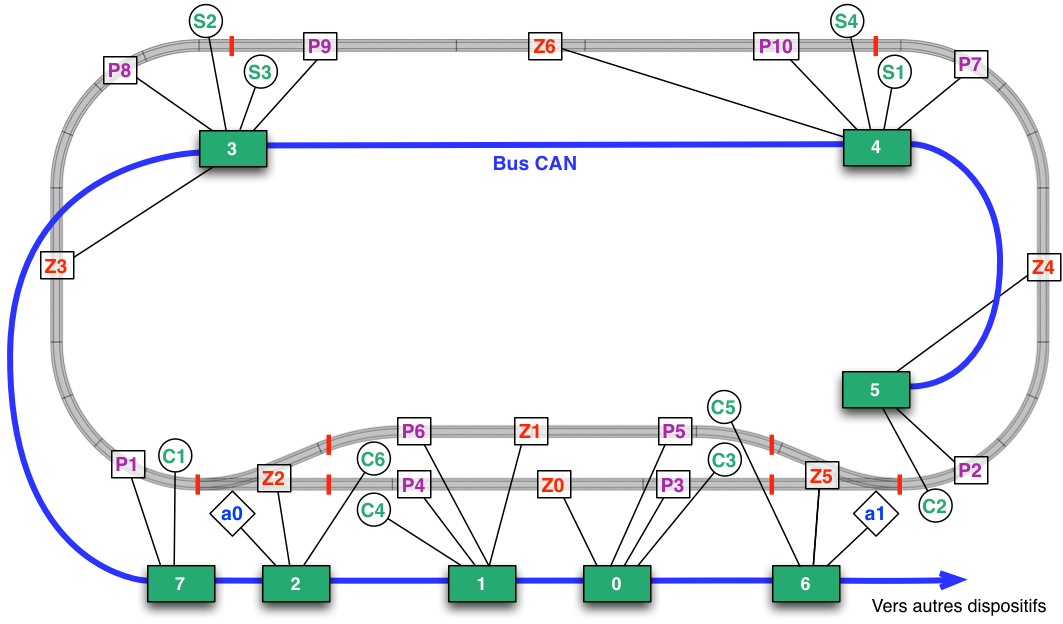
Le compromis que nous avons choisi est d’assurer 3 détections, permettre l’allumage de 9 LED et piloter 1 servo-moteur. Cela permet de gérer la totalité des équipements du réseau avec 8 satellites comme indiqué sur cette figure :
Figure 2 : Allocation des Satellites sur le Locoduinodrome
Les Satellites sont figurés par des rectangle verts. Ils sont reliés par le bus CAN et sont connectés à des détecteurs de consommation de courant
, des balises de détection ponctuelles
, des signaux
ou
et des aiguilles
.
On verra plus loin le détail des branchements quand on en arrivera à la mise en place sur le réseau. Il va sans dire que la version 2 de la carte satellite présentera une configuration moins rigide.
La détection
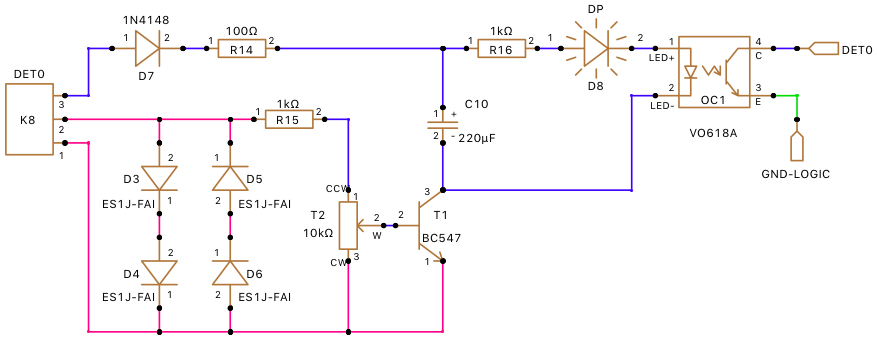
Le Satellite permet la détection d’un train par consommation de courant sur une section de voie. Ce premier détecteur nécessite de l’électronique sur la carte. Il faut en effet mesurer le courant et, lorsqu’il est supérieur à un seuil, signaler la présence. Cela va nécessiter des diodes, un transistor, un opto-coupleur, quelques résistances et condensateurs. Le schéma adopté est présenté figure 3 ci-dessous.
Figure 3 : Détecteur de présence par consommation
Sur le connecteur K8 (à gauche), les broches 1 et 2 s’intercale dans le signal DCC de la zone à détecter. La broche 3 sert à prélever du courant sur le DCC pour charger le condensateur C10. Il doit être de même polarité que celui qui attaque la broche 2. Si un train circule dans la zone, le courant polarise T1, DP s’allume et DET0 est tirée à la masse.
Le Satellite permet également deux détections ponctuelles, via des capteurs : ILS, capteur à effet Hall, barrière IR, détecteur par réflexion, ... pour détecter l’entrée en zone d’arrêt et le déclenchement du freinage, entre autres. Cette détection ne nécessite pas d’électronique sur la carte car ces détecteurs sont équipés d’un connecteur de 3 broches (GND, +5V, Signal).
3 broches de l’Arduino Nano sont donc employées :
Table 1 : Affectation des entrées aux détecteurs
Détecteur
Broche
Détecteur d’occupation DET0
A3
Détecteur Ponctuel DET1
A4
Détecteur Ponctuel DET2
A5
Le servo-moteur
Dans la version actuelle, chaque satellite permet de piloter 1 servo connecté à la broche A2.
Les LED
La notion de signal n’est pas présente au niveau d’un Satellite. La raison est que la configuration d’un Satellite doit rester la plus simple possible. Par conséquent, aucune information de haut niveau n’est présente. Le Satellite ne voit que des LED individuelles, seul le gestionnaire centralisé les assemble pour en faire des signaux.
Toutefois, la carte présente les LED aux signaux sur 3 connecteurs de respectivement 9, 6 et 3 LED. Un signal 3 feux utilisera le connecteur 3 LED et, par exemple, un 7 feux utilisera le connecteur 9 LED. Toutes les LED sont disponibles sur le connecteur 9 LED, 6 d’entre elles sur le 6 et 3 d’entre elles sur le 3. Il est ainsi possible de connecter 3 signaux 3 feux ou moins sur chaque connecteur ou bien un signal 6 feux ou moins sur le connecteur 6 LED et un 3 feux ou moins sur le connecteur 3 LED ou encore un signal 9 feux ou moins sur le connecteur 9 LED.
Les LED sont connectées comme suit sur les broches de l’Arduino :
Table 2 : Affectation des sorties aux LED
LED
Broche
Connecteur 9 LED
Connecteur 6 LED
Connecteur 3 LED
0
D3
x
x
x
1
D4
x
x
x
2
D5
x
x
x
3
D6
x
x
4
D7
x
x
5
D8
x
x
6
D9
x
7
A0
x
8
A1
x
La réalisation de la carte Satellite
Voici les schémas complets d’un satellite :
Schémas de la carte Satellite V1
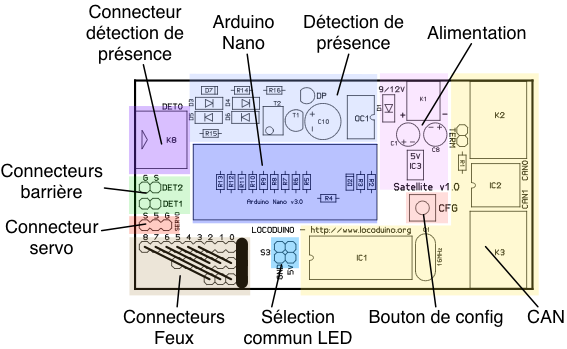
Sur cette figure, on voit les différentes zones fonctionnelles de la carte :
Figure 4 : Distribution des fonctions sur la carte.
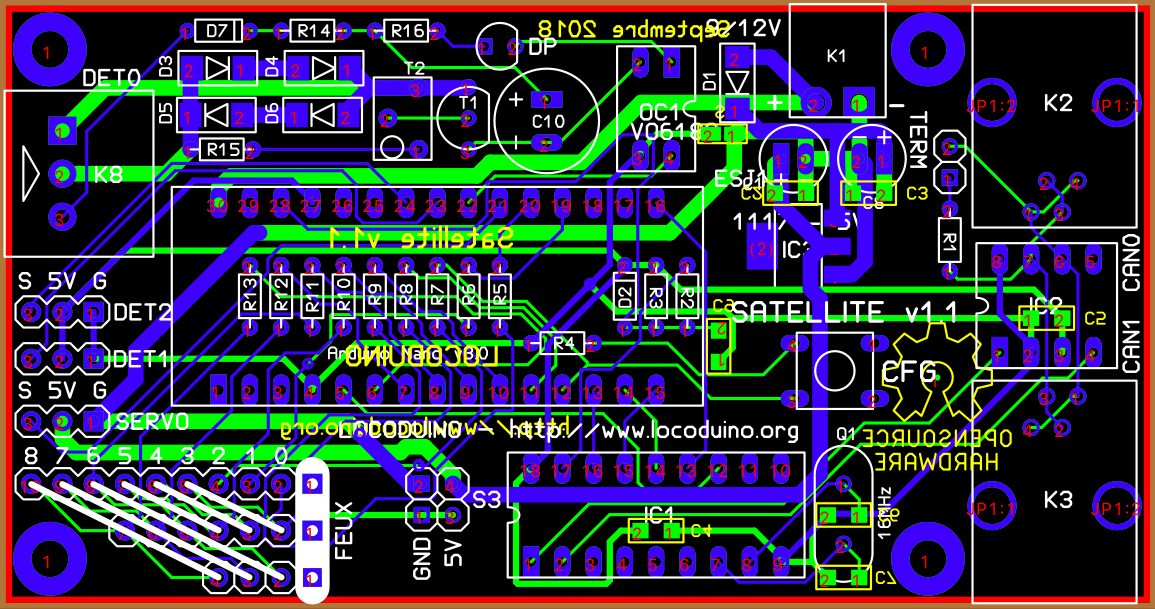
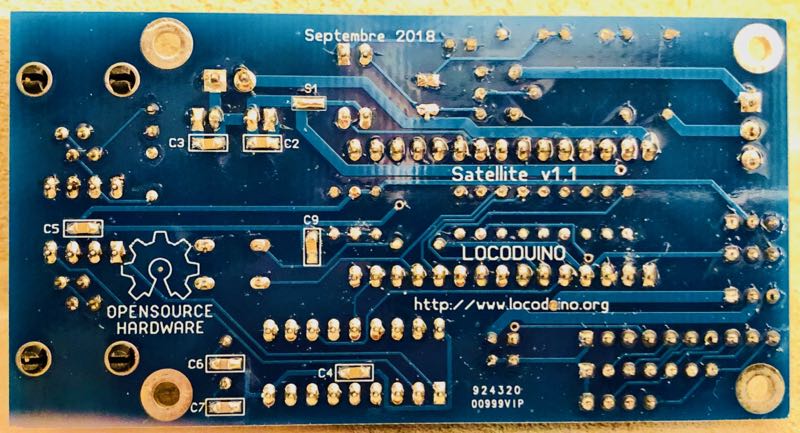
Et voici le dessin du circuit imprimé qui occupe une surface de 10cm x 5 cm :
Figure 5 : Implantation de la carte Satellite V1
À noter que la sérigraphie de la numérotation des LED est inversée par rapport à la table 2.
Figure 5 bis : une autre vue de l’implantation des composants
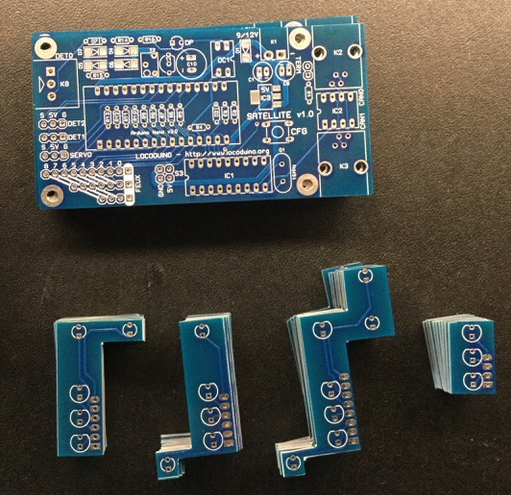
Nous avons fait fabriquer les circuits imprimés. Comme la plupart des fabricants produisent des cartes de 10cm x 10cm à un prix d’appel, il a été décidé, pour le Locoduinodrome d’Orléans, de réaliser aussi en circuit imprimé, des cibles de signaux de grande taille par rapport à l’échelle H0.
Après découpe, nous avons ce jeu de circuits :
Figure 6 : Les circuits imprimés découpés.
En haut, la carte Satellite V1, en bas les cibles des feux exposés à Orléans.
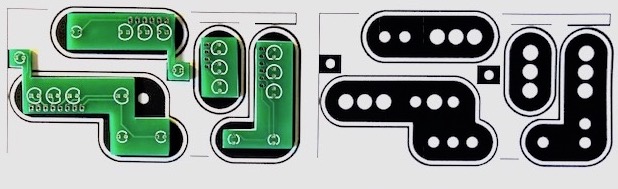
Nous avons confectionné des plaques avant des cibles en papier plastifié et percé à l’emporte pièce :
Figure 7 : Positionnement des circuits imprimés sur les cibles imprimées
ainsi que des supports en impression 3D :
Figure 8 : Une cible en impression 3D fixée sur un circuit imprimé de feu.
Voilà un jeu complet de signaux prêts pour l’exposition :
Figure 9 : Les cibles sont prêtes
Liste des composants, fichiers de fabrication et équipement des satellites
Liste des composants de la carte Satellite V1
Fichiers Gerber pour la fabrication de 2 cartes sur un format 10x10 cm
La quasi totalité des composants a été commandée chez TME. Si vous souhaitez en commander de votre coté nous pouvons fournir les références des composants chez TME.
A titre indicatif, le coût total d’un satellite V1, circuit imprimé et composants, sans le Nano, nous est revenu à 13,50€.
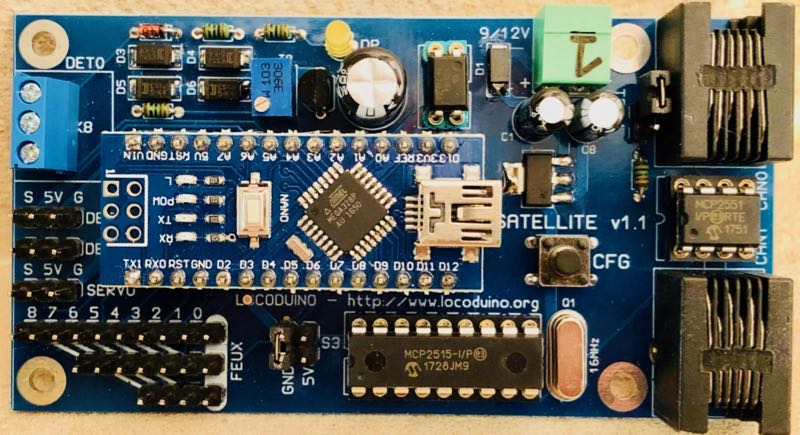
Après équipement des circuits, voilà un beau satellite :
Figure 10 : La carte Satellite V1 montée, côté composants
Figure 11 : La carte Satellite V1 montée, côté cuivre
Vous avez remarqué qu’il y a quelques composants CMS (C2 à C7 et C9 coté cuivre et les diodes D1, D3 à D6 et le régulateur 5V coté composants). Ce n’est pas difficile à souder : il faut couper 1 à 2 mm de soudure fine et la poser contre un coté du composant, tenir le composant en place avec une pince brucelles très fine, puis appliquer la pointe du fer à souder sur la soudure. Le composant est immobilisé et on peut souder l’autre côté de fait de façon conventionnelle.
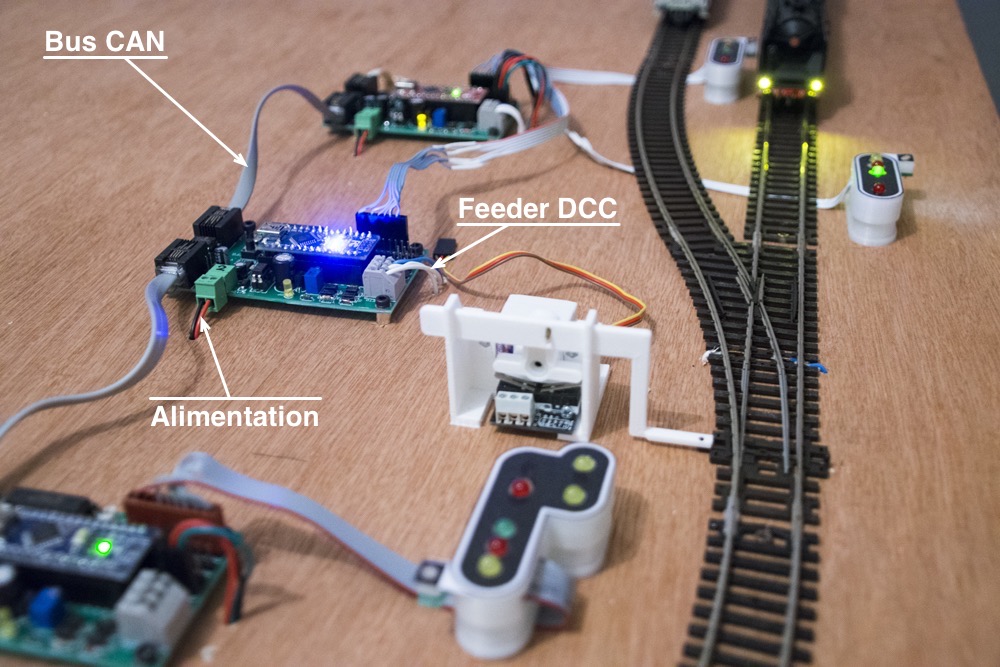
Installation des satellites sur le Locoduinodrome
Figure 12 : L’installation des Satellites est en cours
On remarque le bus Can qui passe de satellite en satellite via des câbles téléphoniques terminés par des prises RJ11, le bus d’alimentation 9V qui alimente les cartes satellite et le bus DCC qui alimente les rails.
On voit ici un satellite avec une commande d’aiguille réalisée avec un servo standard placé dans un convertisseur de rotation en translation (réalisé en impression 3D), et deux satellites connectés à des signaux carrés.
La suite de cette série décrit le logiciel ainsi que la messagerie CAN permettant la communication avec les Satellites.
[1] On laisse également libre les deux broches de la ligne série pour le debug
[2] Le reste du coût de l’électronique évolue en fonction du nombre de dispositifs.
[3] Un autre point qui mérite d’être abordé est la capacité d’alimentation du micro contrôleur. En effet, le fait que le Mega disposent de 60 sorties utilisables ne signifie pas que 60 LED puissent être alimentées. Plusieurs limites intrinsèques existent. La première est le courant total que le micro contrôleur peut fournir sur ses sorties. Pour celui du Mega il s’établit à 200mA, valeur à laquelle le fabricant ne garantit plus le fonctionnement et qui aboutit généralement à la destruction du micro contrôleur. On voit donc qu’une quinzaine de LED demandant chacune 10mA est un maximum
Ça fait plaisir de vous lire !
Super intéressant, surtout que j’ai tout juste fini une carte similaire - sans la partie détection d’occupation puisque j’ai des barrières IR. Au plaisir de discuter du design sur le forum.
D’ailleurs je remarque qu’il y avait une résistance pull-down sur la ligne TXCAN dans le design du module CAN Locoduino (si je ne me trompe pas), qui ne semble pas reprise ici ?
A quoi sert le bouton de config ? Vu qu’il utilise l’une des sorties des leds, il doit probablement n’être actif qu’au démarrage ?
Et je suis curieux de comprendre pourquoi le circuit de reset du MCP2515 est aussi complexe : pourquoi ne pas le relier directement au reset du Nano ?
En attendant, encore merci <3
La résistance pull-down ne nous a pas semblé indispensable.
Concernant le circuit de reset, c’est ce qui est préconisé dans la datasheet du MCP2515. Le but est de faire un signal qui monte plus doucement et qui ne subit pas les rebonds du reset.
Le bouton de config sert à remettre le satellite dans son état initial et est donc lu au démarrage.
Bonjour Pierre,
Vous n’avez pas lu l’article La carte Satellite V1 (1) qui donne les principes fondateurs. Il n’y a pas besoin de décodeur DCC pour les accessoires, ceux-ci étant commandés directement via Can par le système de Gestion (sans passer par la centrale DCC ou analogique).
Nous n’avons pas prévu cette fonction décodeur d’accessoires mais il y aura des détecteurs et des actionneurs.
Cordialement
Merci de cette réponse rapide, qui me pose une autre question :
je suis équipé du logiciel de gestion RRTC. Est-ce que je pourrais néanmoins commander mes aiguillages à partir de mon logiciel ?
Même en lisant l’article1, je ne vois pas trop comment.
J’espère que vous serez à Trainmania en mai 2019, car j’ai hâte de voir tout ça de près.
Je m’en doutais ;)
Pour utiliser ces satellites avec l’interface SAM que nous allons décrire prochainement, il faudrait que RRTC intègre SAM.
JMRI est probablement mieux placé que RRTC pour cela, mais si quelqu’un veut le faire pour RRTC, why not.
L’objectif de SAM et du reste, est de permettre de réaliser son propre gestionnaire en DIY, comme le reste !
Les satellites utilisent des structures de messages qui leur sont propres. J’ai rédigé quelques pages qui expliquent le principe de ces messages. Il est prévu de publier cela prochainement mais si Jean-Luc n’y voit pas d’inconvénient, je veux bien ouvrir un nouveau fil sur le forum sur ce sujet pour mettre ce document à disposition et discuter de cette question de passerelle.
Réaliser une passerelle n’est pas en soit quelque chose de très compliqué. Le principal inconvénient et que l’on ajoute du traitement et donc forcement un temps de réponse un peu plus long. Mais on parle sans doute de 10ièmes ou de 100ièmes de secondes.
J’en ai réalisé une passerelle qui permet d’envoyer des messages à partir du port série (avec par exemple la zone de saisie de l’IDE Arduino ou mieux avec un client série comme CoolTerm) au bus CAN des satellites et vis versa, de recevoir sur le port série, les messages circulants sur le bus CAN.
Cette passerelle fait la même chose en TCP avec des clients connectés en Websockets dans les deux sens également.
Après réflexion, il me semble que le protocole à utiliser pour l’Ethernet et le WiFi devrait plutôt être l’UDP que le TCP. L’UDP est plus rapide que le TCP puisque c’est un mode de communication sans connexion. Son principal problème est le risque de perte de données mais qui ne se pose pas avec les satellites puisque les messages CAN sont régulièrement répétés. La perte occasionnelle d’un paquet est sans conséquence.
L’UDP est par ailleurs multicast et broadcast. En ce sens, il est assez similaire au CAN pour lequel tous les messages peuvent être vus par tous.
Dans le cas où le bus utilisé pour RRTC, iTrain, CDM Rail ou encore JMRI serait le CAN, la passerelle ne correspondrait en fait qu’à une seule table de correspondance de messages.
Bonjour,
d’abord, bravo, j’ai toujours pensé que le principe du satellite était la bonne approche !
quelques mots pèle-mêle, humble point de vue perso, réponses facultatives, mais peut-être des idées pour la v2 :
un geste pour la planète : faire un plan de masse sur les 2 faces, cela améliore le fonctionnement ... et les conditions de travail des graveurs (- d’acide, - d’émanations, - de rejets)
un geste pour la planète, encore : généraliser les cms, - de percements et de métallisation, - de soudure. Quand on en fait certains, autant les faire tous. De + cela fera de la place sur le pcb, donc permettra d’y rajouter des choses. Pour mémoire, contrairement à une idée (f)curieusement tenace, les cms (sauf de petite taille, mais il n’y en a pas ici) sont plus faciles à souder : pas de patte à plier, pas besoin de retourner (et perdre le composant) pour souder, pas d’excédent à couper et à jeter
éviter les composants côté "soudures" : si un jour il est envisagé de faire réaliser une série, ce sera facile pour l’entreprise
doubler le connecteur d’alim : cela permet d’aller d’une carte vers l’autre, comme le bus, d’éviter des repiquages. Par ailleurs il est peut-être envisageable de transporter cette alim par le bus, 2 fils sont libres
le choix de la connectique : je pense que le dupont de base n’est pas à la hauteur de l’événement ... perso, j’utilise le jst. Il faut une pince à sertir avec une mâchoire différente que pour le dupont. Pas question d’imposer ça, mais si l’empreinte sur le pcb ne permet pas d’implanter du jst, c’est râpé
la taille du pcb : on peut à présent dépasser le 100x50, pour être à l’aise, et pas seulement vis-à-vis des suggestions que j’ai faites
le choix de l’arduino : (sans doute largement discuté par ailleurs) s’agissant d’un programme unique, et fait 1x pour toutes (en rêve) il est peut-être envisageable de laisser le nano pour le mini. La carte satellite a certaines exigences, ceux qui sauront la mettre en oeuvre sauront programmer un mini avec un usbaps. Pour cela et pour la maintenance, un simple connecteur jst sur la carte doit faire le job, globalement cela prendra - de place
concernant le programme, je le mets ici : 15 satellites, cela risque de ne pas suffire pour les réseaux d’une certaine taille. Quelque chose est prévu pour en avoir + ?
merci pour les compliments :) mes réponses point par point :
je suis sensible à ces questions. Oui c’est une bonne idée. Le logiciel que j’utilise ne le permet pas pour l’instant mais j’espère qu’il le pourra bientôt.
jusqu’à un certain point. Effectivement les CMS ne sont pas plus difficiles à souder (enfin, la difficulté est différente) mais Il faut penser à l’accessibilité pour que la carte soit réalisable par le plus grand nombre. Les résistances CMS sont fines et moins faciles à souder que des traversantes. De plus en tout CMS on ajoute des vias et le gain écologique n’est pas aussi évident. Il faut également penser à la maintenance et aux remplacement des composants.
à voir
je n’y suis pas favorable. Ça ajoute du matériel inutilement (en contradiction avec les points 1 et 2) et ça engendre un chaînage linéaire où les pistes de la première carte supportent le courant de toute la chaîne. Le passage de l’alimentation via le faisceau de fils du bus à été discuté et rejeté : la section des fils est insuffisante et pour tenir la consommation et on a aussi un chaînage linéaire. De plus, il devient impossible de ne pas alimenter une carte située au milieu d’une chaîne en gardant le bus (cas fréquent en cours d’installation et pour débogguer un problème). Enfin, mener une alimentation conjointe aux signaux faibles d’un bus est chercher les ennuis.
il n’y a pas la place pour du JST sur le V2
oui mais le coût n’est pas le même et la modularité de la v2 empêche le passage à du 100x100. On pourrait aussi évoquer le point 1 pour militer en faveur d’une carte de taille réduite.
le nano a été choisi pour sa plus grande facilité de mise en œuvre, sa plus grande facilité de programmation et sa standardisation (les pro mini existent en de multiples variantes dans la disposition des broches malheureusement.
ce point est lié à l’identifiant des messsages dont le nombre de bits significatifs a été choisi pour le locoduinodrome. Rien n’empêche de passer à des identifiants de satellite sur 6 ou 7 bits.
Bonjour.
Je lis et essaye de comprendre !
Bravo pour le boulot effectué. Beau travail, et en plus vous êtes le premier à offrir une possibilité du vrai numérique, avec le SAM ...
Question stupide de ma part :
ce point est lié à l’identifiant des messsages dont le nombre de bits significatifs a été choisi pour le locoduinodrome. Rien n’empêche de passer à des identifiants de satellite sur 6 ou 7 bits.
Pour changer la longueur des adresses des satellites, il faut reconfigurer le mic 2515 ?
Je demande, parce que je ne comprends déjà pas tout dans la programmation !
Ou apprendre le C arduino ?
mais mon probleme est peut être d’apprendre le C ?
je n’ais pas vu quand on programme un Id satellite sur l’octet de poids faibles...
Avec tous mes remerciements, et avec l’expression de mon admiration, sur ce que vous faite !
Je souhaite me lancer dans la fabrication de la carte Satellite V1 dans un premier temps. Il y a dans cet article la liste des composants mais je ne vois pas le typon. Je suppose que la société TME a besoin du typon pour fabriquer les cartes et que les schémas ne suffisent pas. (J’ai peut-être loupé un épisode).
PS : La conférence sur la V2 à trainsmania à lille était passionnante !!
Merci beaucoup pour votre réponse très rapide !!
J’ai 2 questions :
au moment de la commande, sur le site seeed, y a-t-il des options à cocher où faut-il laisser toutes les options par défaut ? (j’ai simplement choisi un circuit de couleur bleu) ?
Visiblement, on peut commander 20 circuits pour 4,90€, c’est incroyable ! par contre au delà de cette quantité, les prix grimpent.
Par ailleurs, si j’ai bien compris, le site propose de souder les composants gratuitement mais il faut fournir un fichier. Est-ce intéressant ? Si oui quel fichier dois-je fournir ?
Merci d’avance pour votre aide.
Cordialement, Cyril
Les options par défaut conviennent tout à fait, il y a juste la couleur à choisir. Concernant le soudage des composants, je n’ai jamais essayé et je n’ai pas examiné ce qu’il faut fournir. Par contre ce n’est pas gratuit en général, il y a juste une offre en ce moment (5 pièces gratuites et une seule fois par client).
Cordialement
Bonjour,
Le concept carte satellite est très intéressant, pour mon circuit j’aurais besoin d’avoir des cartes avec 8 servos , des cartes avec 6 détect, est ce possible ?
Merci
sur la Carte Servomoteurs DCC + CAN sont prévues des résistances de pull-up sur les 8 lignes servo. Elles tirent le signal au 5V pour éviter, je crois, les mouvements erratiques des servos au démarrage de l’arduino. Ces résistances ne semblent pas présentes sur les cartes satellites : est-ce que les mouvements des servos au démarrage ont été évités d’une autre manière ?
Bonjour, ces articles sont passionnants et j’ai commandé le cartes que je devrais recevoir ces jours-ci.
Par contre, TME ne me répond pas... Vous proposez de fournir la liste des références de composants chez TME. Pourriez vous me la transmettre ?
En vous remerciant encore, j’ai réalisé une centrale DCC à partir de vos articles, et j’espère pouvoir alimenter le site avec mes dévellppements. Mais je démarre mon train et je n’ai pas encore beaucoup à apporte...
Cordialement
Claude Quinot
Bravo pour votre parcours avec Locoduino, qui nous honore 😃.
Pour commander chez TME, il faut s’inscrire et moi, j’utilise l’application sur iPhone.
Je peux vous envoyer la liste d’une ancienne commande chez TME. Ça devrait vous aider. Vus les frais de port DHL) il vaut mieux faire le plein !
Je me suis inscrit et j’ai envoyé il y a 15 jours la liste donnée dans votre document. Mais TME ne répond pas. Je veux bien une ancienne commande comme vous le proposez. J’ai cependant une question : n’y a-t-il pas de fournisseur plus près ( en France par exemple) ?
en vous remerciant d’avance,
cordialement
claude quinot
Que voulez-vous dire par « TME ne répond pas » ?
il est en Europe et nous avons tous commandé avec succès, livraison rapide et produits de qualité. Vous pouvez trouver d’autres fournisseurs comme indiqué dans nos articles « où acheter ». Je comprends mal votre question. J’étais sur la route aujourd’hui.
Merci pour votre réponse... Je n’ai pas été clair. J’ai envoyé la liste de composants à TME après m’être inscrit sur leur site Internet. Ça fait maintenant 15 jours. J’ai relancé (par la fenêtre contact de TME), en demandant (en anglais) comment leur soumettre une liste de matériel à commander. J’ai relancé une troisième fois. Mais je n’ai aucune réponse. Je pense que je vais faire une commande composant par composant. Si vous pouviez m’envoyer une de vos commandes pour ces composants, je vous serez reconnaissant.
Cordialement ;
Claude
Bonjour, TME fonctionne comme tous les sites marchand : créer un panier, choisir les composants et les mettre dans le panier. A la fin : payer. Je vous envoie ma liste cet après midi comme exemple mais il faudra vérifier les disponibilités.
Je me fais un projet de plateforme ferroviaire modulable et j’aimerais bien y intégrer des cartes satellites. Ma question est de savoir s’il serait possible d’en commander déjà toute faite auprès de Locoduino.
Locoduino n’est pas une organisation commerciale donc ne vend rien.
Mais vous pouvez reproduire et ou modifier les réalisations décrites selon vos besoins en DIY (do it yourself).
Amicalement.
Dominique
Bonjour,
En fait je suis un étudiant en école d’ingénieur, et je souhaite faire une commande d’une carte satellite pour notre projet de fin d’étude qui est de réaliser un maquette ferroviaire modulable.
Comment faire cette commande ?
Bonjour.
Comme l’a signalé Dominique, nous ne vendons rien. Nous proposons des manières de faire et d’apprendre pour les modélistes, rien de plus. Si une réalisation, comme la carte satellite, vous plait, il faut récupérer les fichiers Gerber dans l’article, faire fabriquer la carte par un prestataire (par exemple JLCPCB en Chine) avec ces fichiers, puis commander les composants, assembler et tester le tout... Et si vous rencontrez un problème avec la carte assemblée, on pourra vous aider sur le forum.